
公司地址:江西省南昌市
客服QQ:123456789
传 真:400-123-4567
足球直播 zuqiuzhibo 分类>>
百亿英里数据即将达成特斯拉FSD遥遥领先了?足球直播- NBA直播- 世界杯专业赛事超清Live
 2026-03-12 11:47:34
2026-03-12 11:47:34 浏览次数: 次
浏览次数: 次 返回列表
返回列表足球直播,欧洲杯直播,体育直播,球客直播,雷速体育,篮球直播,风驰直播,NBA直播,英超直播,足球比分,足球赛事,意甲,欧冠,世界杯,世界杯直播,村超,贵州村超,波胆,角球,串球,大小球当数百万辆特斯拉穿梭在全球各地的街道,它们的车载摄像头不只是记录道路状况,更是在为特斯拉 FSD(完全自动驾驶系统)源源不断地输送训练数据;深夜里,特斯拉 Dojo 超级计算机集群持续高速运转,数千个专用芯片解析着全球车队传回的数十亿帧视频,挖掘那些罕见的驾驶 “边缘案例”。这是一场全球规模的机器学习实验,而背后的核心,是马斯克口中实现真正自动驾驶的关键 ——100 亿英里的训练数据。

特斯拉 FSD 的进化,是一场由数据、算法、算力共同驱动的技术革命,从数据积累到模式革新,从算力升级到全球适配,每一步都藏着自动驾驶实现的核心逻辑,今天我们就来拆解这些关键概念,看懂 FSD 如何 “学会” 开车。
特斯拉自动驾驶的核心逻辑,是用真实世界的海量数据教会汽车驾驶,这也是其与传统自动驾驶研发的核心区别。早在 2019 年,特斯拉首次公布其自动驾驶系统学习了 1000 万个视频片段时,已是行业内的亮眼成绩;而如今,马斯克定下了 100 亿英里的终极训练目标,这一数字远超所有竞争对手数据量的数十倍。
截至 2025 年底,FSD 的累计训练里程已突破70 亿英里,其中城市道路训练里程超25 亿英里,全球特斯拉车队还在以数千万英里 / 天的速度持续积累数据,按照这个增速,2026 年中就能达成百亿英里的目标。

这一数字并非随意设定,特斯拉工程师发现,自动驾驶的最大挑战,是那些罕见的长尾场景—— 即道路上偶发的复杂、特殊驾驶情况,而随着训练数据呈指数级增长,FSD 处理这类场景的能力会显著提升。简单来说,数据越丰富,AI 见过的路况越多,应对突发情况的能力就越强。
特斯拉自动驾驶的发展,曾经历过一次根本性的技术转折,而这一转折的核心,是放弃传统的规则编程,转向端到端神经网络,这一改变集中体现在 FSD V12 的发布中。
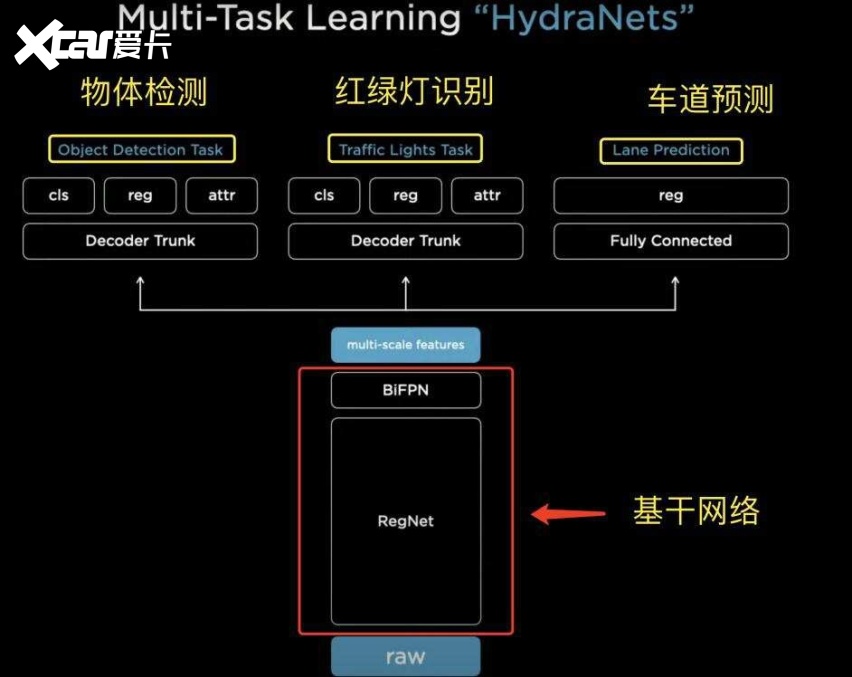
在 FSD V12 之前,工程师们的研发思路是编写数十万行规则代码,用 “如果 - 那么” 的逻辑教汽车应对各种路况:如果遇到红灯,就停车;如果遇到行人,就避让…… 但这套方法存在致命缺陷 —— 脆弱且复杂,面对代码中未预设的未知场景,系统便会陷入卡顿,根本无法适配千变万化的线 年,特斯拉彻底推翻这一路径,正式采用端到端神经网络技术。这一模式的核心是端到端学习:工程师不再告诉汽车具体的驾驶规则,而是向神经网络投喂海量的真实驾驶视频,让 AI 自己观察、总结、寻找驾驶模式和逻辑。就像人类学习驾驶,靠的是实际道路的观察和经验积累,而非死记硬背交通规则手册。
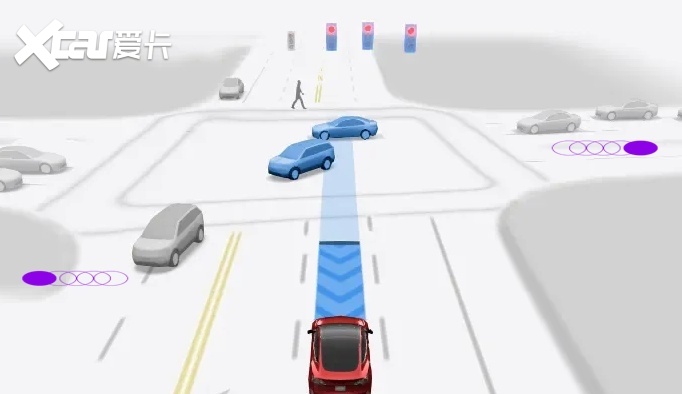
这一转变带来了立竿见影的效果:FSD 的驾驶决策变得流畅自然,不再出现早期版本中机械、迟疑的驾驶风格,神经网络真正学会了识别场景的本质,而非仅仅是表面特征,让 AI 驾驶更接近人类的判断逻辑。
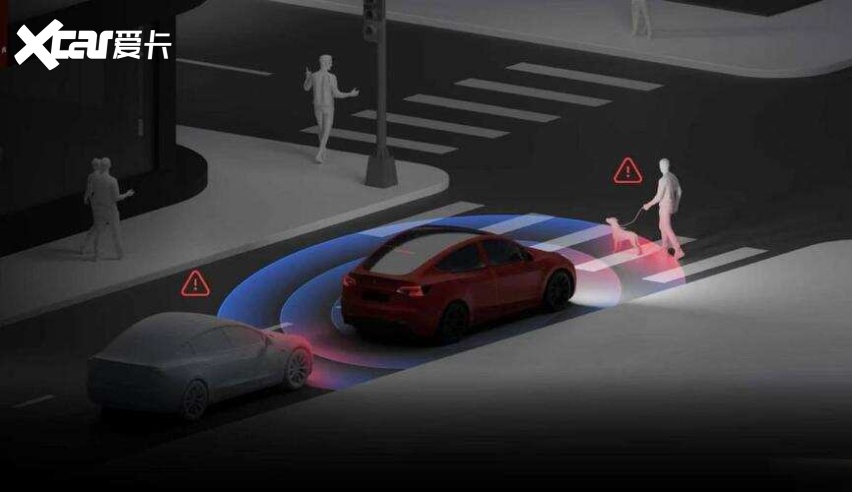
数据引擎的筛选有明确的核心标准,只聚焦四类场景:系统不确定的场景(神经网络置信度低的时刻)、人类驾驶员介入的情况(人类接管车辆的瞬间)、预测偏差(系统预判的路况与实际发生不符)、罕见事件(道路上不常见的复杂情况)。这些筛选出的边缘案例会被优先送入训练管道,形成发现问题 - 标记数据 - 重新训练的快速迭代循环,让 FSD 持续针对性优化。
为了弥补真实世界中边缘案例的数量不足,特斯拉还开发了世界模拟器:在虚拟环境中精准重现各类边缘场景,并通过调整参数生成多种变体,极大丰富了训练数据的多样性。借助这一模拟器,FSD 能在一天内积累相当于人类500 年的驾驶经验,大幅提升训练效率。
早期,特斯拉的模型训练依赖由数千个 GPU 组成的通用计算集群,但随着 FSD 模型规模不断扩大,通用 GPU 的短板逐渐显现 —— 训练效率低、成本高,已无法满足海量数据的处理需求。2021 年,特斯拉发布自研的Dojo 超级计算机,这是专为神经网络训练设计的专属架构,其核心创新在于芯片间通信设计,能将数千个训练节点高效连接,让数据传输和处理的效率实现质的飞跃。
这一自研超算的优势,在 2025 年 8 月体现得淋漓尽致:当时特斯拉开始训练参数规模扩大约 10 倍的新 FSD 模型,对算力提出了极高要求,而 Dojo 超算直接将原本需要数月的训练时间,缩短到了数周。马斯克曾直言:“Dojo 是我们整个自动驾驶战略的基石。” 这一自研计算基础设施的建立,不仅提升了训练效率、降低了计算成本,更让特斯拉在自动驾驶竞赛中建立了关键的技术壁垒。
而本土化训练的核心,是理解当地的实际驾驶行为,而非仅仅掌握交通规则。比如欧洲的环岛通行、北美的四向停车、亚洲的混合交通,每种场景都有独特的驾驶逻辑;针对中国市场,特斯拉更是明确了三大训练重点:数量庞大且行驶路径难以预测的电动自行车、行人密集的人行横道 / 市场 / 学校周边、多车道的不规则复杂路口,同时兼顾各地不同的交通执法习惯,并特意提升了这类场景的训练数据比例,这也是 FSD 在不同市场表现存在差异的核心原因。

为了验证系统安全性,特斯拉建立了多层次安全验证体系,遵循从虚拟到现实、从有限到开放的原则,分为四个阶段:仿真测试(在世界模拟器中完成海量场景测试)、封闭场地测试(在专用测试场模拟各类路况)、有限区域公共道路测试(在指定区域进行真实道路测试)、大规模部署(在获批地区全面开放),每一层测试都旨在发现并解决潜在的安全问题,层层把关。
目前,监管机构对自动驾驶的态度仍较为谨慎,各国的技术标准、保险责任界定、法律法规适配都存在巨大差异,尚未形成统一的监管体系。为此,特斯拉采取渐进式部署策略:先在技术和监管环境更成熟的地区(如北美部分区域)获得审批,再逐步向其他地区扩展;同时,特斯拉也在开发更完善的数据记录和分析工具,用真实的驾驶数据向监管机构证明 FSD 的安全性 —— 如今在北美许多区域,FSD 每千英里的人类干预次数,已经低于普通驾驶员的操作错误率,这也成为其证明安全性的关键证据。

数百万辆特斯拉还在全球的道路上收集数据,Dojo 超算还在日夜不停的运转,这场由数据驱动的自动驾驶革命,不仅在改变人类的出行方式,更在重新定义人与机器在移动空间中的关系。或许在不久的将来,当我们坐进特斯拉,让车辆自主完成一次复杂的城市通勤时,我们感受到的,不仅是科技的便利,更是百亿英里数据、数千万视频片段、无数边缘案例共同塑造的,属于 AI 的驾驶智能。
去年有三个月,我都在开车去东南亚 热带去太多会很闷的 所以,今年春节我想搞点新鲜的事情 「粤车北上」! 开着自己的车踏雪,从广东出发 一路向北,直达河北崇礼 横跨50度的气温差异,抵达零下20度的崇礼 我只是提前换了一套米其林跨悦轮胎 就跟岚图FREE+、meimeiS开始 这段......
 友情链接:
友情链接:





